来源: 科学网 作者: 生命科学 2018-10-26
基于记忆晶体管的机械柔性人工突触,可以表现出不同类型的突触可塑性。突触是神经形态计算的一个基本组成部分(一种大脑启发计算方法,旨在提供较传统方法而言更为高效的计算方法)。目前,Yiqiang Zhan,Lirong Zheng和Fernando Seoane与来自瑞典和中国的合作者们,报道了一种人工突触,该突触是基于具有机械柔性的记忆晶体管设计的。这种突触设计的关键是一个三端结构,它可以进行栅极调谐。通过调节栅极端上的电压,使得器件的变化能够得到补偿,从而提高突触的一致性和可重复性。研究人员还发现栅极调谐可以将每次峰值事件的总能量消耗降低至45fJ,并展示了对于复制神经形态行为很重要的各种突触塑性特征。
柔性电子元件一直被认为是实现可穿戴电子系统的有效方法。然而,由于传统的计算模式无法与现有的柔性器件相匹配,导致该领域的发展停滞不前。研究提出了一种可实现这一目标的新方法,即将柔性器件与神经形态架构结合在一起。通过精心设计和优化记忆晶体管,创建一种高性能的柔性人工突触。该器件性能好,可在515%动态范围内,实现在10000个相同脉冲信号下,具有接近线性的非易失性电阻变化,并且每个脉冲的能量消耗低至45fJ。它还拥有多个突触可塑性特征,使其可用于实时的在线学习。此外,由于其三端结构的适应性,该器件的一致性和可重复性得到提高,同时还可降低能耗。这项工作为未来的可穿戴计算提供了一个非常可行的解决方案。
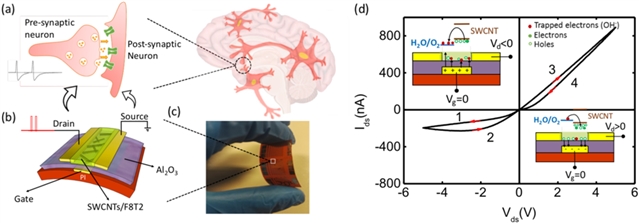
人工突触的原理示意图和工作机理
|